





工業機器人的驅動源通過(guò)傳動部件來驅動關節的移動或轉動,從而實現機身、手臂和 手腕的運動。因此,傳動部件是構成(chéng)工業機器人的重要部件。根據傳動類型的不同,傳動部件可以分爲兩(liǎng)大類:直線傳動機構和旋轉傳動機構。
一、直線傳動機構
工業機器人常用的直線傳動機構可以直接由汽缸或液壓缸和活塞産生,也可以采用齒 輪齒條、滾珠絲杠螺母等傳動元件由旋轉運動轉換得到。
1.移動關節導軌
在運動過(guò)程中移動關節導軌可以起(qǐ)到保證位置精度和導向(xiàng)的作用。移動關節導軌有五 種(zhǒng):普通滑動導軌、液壓動壓滑動導軌、液壓靜壓滑動導軌、氣浮導軌和滾動導軌。
前兩(liǎng) 種(zhǒng)導軌具有結構簡單、成(chéng)本低的優點,但是它必須留有間隙以便潤滑,而機器人載荷的大 小和方向(xiàng)變化很快,間隙的存在又將(jiāng)會(huì)引起(qǐ)坐标位置的變化和有效載荷的變化;另外,這(zhè) 種(zhǒng)導軌的摩擦系數又随著(zhe)速度的變化而變化,在低速時(shí)容易産生爬行現象等缺點。
第三種(zhǒng)靜壓導軌結構能(néng)産生預載荷,能(néng)完全消除間隙,具有高剛度、低摩擦、高阻尼等優點,但 是它需要單獨的液壓系統和回收潤滑油的機構。
第四種(zhǒng)氣浮導軌的缺點是剛度和阻尼較低。
目前第五種(zhǒng)滾動導軌在工業機器人中應用最爲廣泛,如圖2-15所示爲包容式滾動導 軌的結構,用支承座支承,可以方便地與任何平面(miàn)相連,此時(shí)套筒必須是開(kāi)式的,嵌入在 滑枕中,既增強剛度也方便了與其他元件的連接。
2. 齒輪齒條裝置
齒輪齒條裝置中 (圖2-16),如果齒條固定不動,當齒輪轉動時(shí),齒輪軸連同拖闆沿 齒條方向(xiàng)做直線運動。這(zhè)樣,齒輪的旋轉運動就(jiù)轉換成(chéng)拖闆的直線運動。拖闆是由導杆或 導軌支承的,該裝置的回差較大。
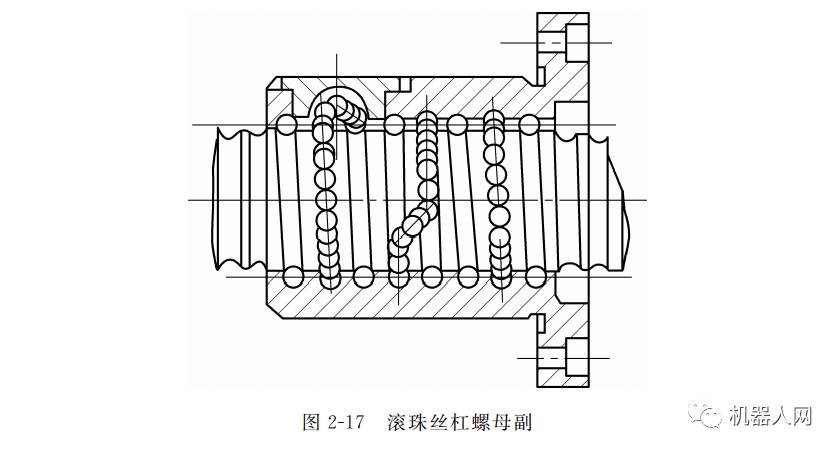
3. 滾珠絲杠與螺母
在工業機器人中經(jīng)常采用滾珠絲杠,這(zhè)是因爲滾珠絲杠的摩擦力很小且運動響應速度 快。
由于滾珠絲杠螺母的螺旋槽裡(lǐ)放置了許多滾珠,絲杠在傳動過(guò)程中所受的是滾動摩擦 力,摩擦力較小,因此傳動效率高,同時(shí)可消除低速運動時(shí)的爬行現象;在裝配時(shí)施加一 定的預緊力,可消除回差。
如圖2-17所示滾珠絲杠螺母裡(lǐ)的滾珠經(jīng)過(guò)研磨的導槽循環往複傳遞運動與動力。滾 珠絲杠的傳動效率可以達到90%

4. 液 (氣)壓缸
液 (氣)壓缸是將(jiāng)液壓泵 (空壓機)輸出的壓力能(néng)轉換爲機械能(néng)、做直線往複運動的 執行元件,使用液 (氣)壓缸可以容易地實現直線運動。液 (氣)壓缸主要由缸筒、缸 蓋、活塞、活塞杆和密封裝置等部件構成(chéng),活塞和缸筒采用精密滑動配合,壓力油 (壓縮 空氣)從液 (氣)壓缸的一端進(jìn)入,把活塞推向(xiàng)液 (氣)壓缸的另一端,從而實現直線運 動。通過(guò)調節進(jìn)入液 (氣)壓缸液壓油 (壓縮空氣)的流動方向(xiàng)和流量可以控制液 (氣) 壓缸的運動方向(xiàng)和速度。
二、旋轉傳動機構
一般電動機都(dōu)能(néng)夠直接産生旋轉運動,但其輸出力矩比所要求的力矩小,轉速比要求 的轉速高,因此需要采用齒輪、皮帶傳送裝置或其他運動傳動機構,把較高的轉速轉換成(chéng) 較低的轉速,并獲得較大的力矩。運動的傳遞和轉換必須高效率地完成(chéng)。并且不能(néng)有損于 機器人系統所需要的特性,包括定位精度、重複定位精度和可靠性等。通過(guò)下列傳動機構 可以實現運動的傳遞和轉換。
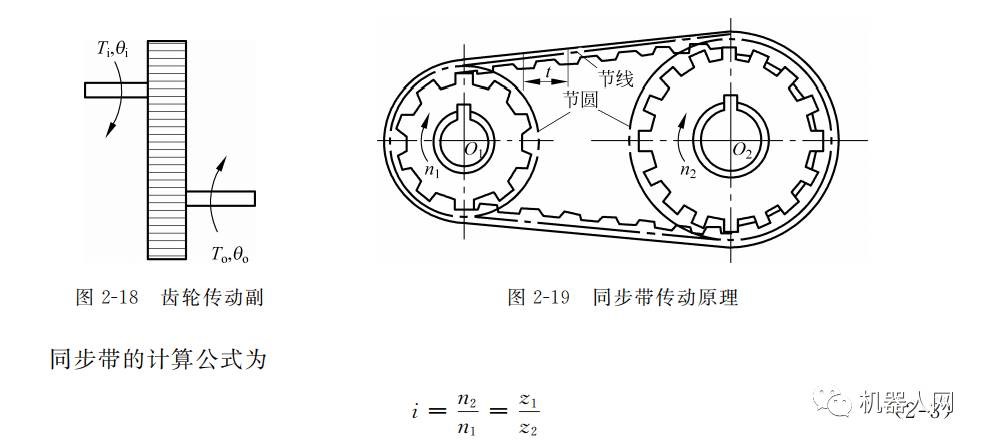
1.齒輪副
齒輪副不但可以傳遞運動角位移和角速度,而且可以傳遞力和力矩,如圖2-18所示, 一個齒輪裝在輸入軸上,另一個齒輪裝在輸出軸上,可以得到齒輪的齒數與其轉速成(chéng)反比 [式 (2-1)],輸出力矩與輸入力矩之比等于輸出齒數與輸入齒數之比 [式 (2-2)]。
2. 同步帶傳動裝置
在工業機器人中同步帶傳動主要用來傳遞平行軸間的運動。同步傳送帶和帶輪的接觸 面(miàn)都(dōu)制成(chéng)相應的齒形,靠齧合傳遞功率,其傳動原理如圖2-19所示。齒的節距用包絡帶 輪時(shí)的圓節距t表示。

式中:n1 爲主動輪轉速 (r/min);n2 爲被動輪轉速 (r/min);z1爲主動輪齒數;z2 爲被 動輪齒數。
同步帶傳動的優點:傳動時(shí)無滑動,傳動比準确,傳動平穩;速比範圍大;初始拉力 小;軸與軸承不易過(guò)載。但是,這(zhè)種(zhǒng)傳動機構的制造及安裝要求嚴格,對(duì)帶的材料要求也 較高,因而成(chéng)本較高。同步帶傳動适合于電動機和高減速比減速器之間的傳動。
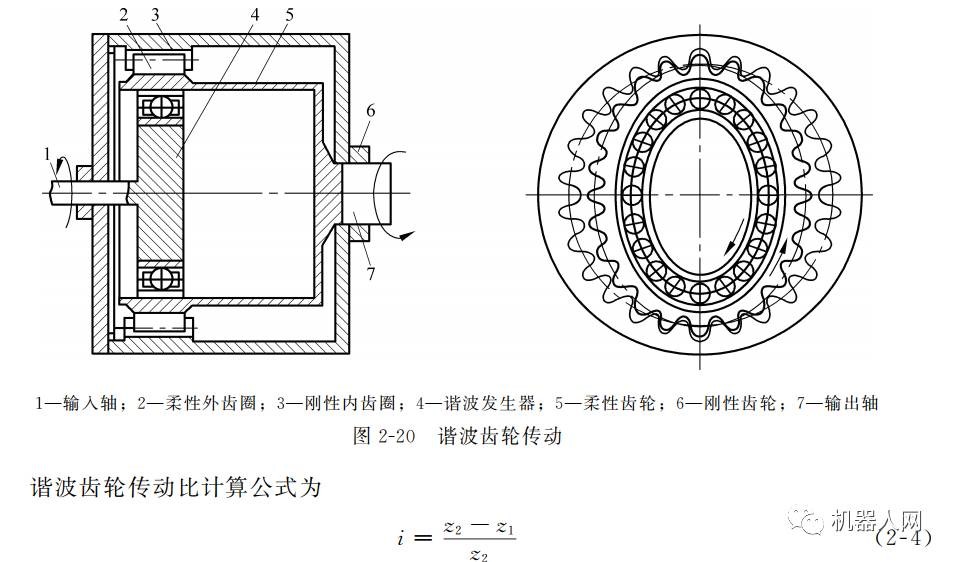
3. 諧波齒輪
目前工業機器人的旋轉關節有60%~70%都(dōu)使用諧波齒輪傳動。
諧波齒輪傳動由剛性齒輪、諧波發(fā)生器和柔性齒輪三個主要零件組成(chéng),如圖2-20所 示。
工作時(shí),剛性齒輪6固定安裝,各齒均布于圓周上,具有外齒圈2的柔性齒輪5沿剛 性齒輪的内齒圈3轉動。柔性齒輪比剛性齒輪少兩(liǎng)個齒,所以柔性齒輪沿剛性齒輪每轉一 圈就(jiù)反向(xiàng)轉過(guò)兩(liǎng)個齒的相應轉角。諧波發(fā)生器4具有橢圓形輪廓,裝在其上的滾珠用于支 承柔性齒輪,諧波發(fā)生器驅動柔性齒輪旋轉并使之發(fā)生塑性變形。轉動時(shí),柔性齒輪的橢圓形端部隻有少數齒與剛性齒輪齧合,隻有這(zhè)樣,柔性齒輪才能(néng)相對(duì)于剛性齒輪自 由地轉過(guò)一定的角度。通常剛性齒輪固定,諧波發(fā)生器作爲輸入端,柔性齒輪與輸出 軸相連。
式中:z1 爲柔性齒輪的齒數;z2 爲剛性齒輪的齒數。假設剛性齒輪有100個齒,柔性齒 輪比它少兩(liǎng)個齒,則當諧波發(fā)生器轉50圈時(shí),柔性齒輪轉1圈,這(zhè)樣隻占用很小的空間 就(jiù)可以得到1∶50的減速比。通常將(jiāng)諧波發(fā)生器裝在輸入軸,把柔性齒輪裝在輸出軸,以 獲得較大的齒輪減速比。
4. 擺線針輪傳動減速器
擺線針輪傳動是在針擺傳動基礎上發(fā)展起(qǐ)來的一種(zhǒng) 新型傳動方式,20世紀80年代日本研制出了用于機器 人關節的擺線針輪傳動減速器,圖2-21所示爲擺線針輪 傳動簡圖,
它由漸開(kāi)線圓柱齒輪行星減速機構和擺線針 輪行星減速機構兩(liǎng)部分組成(chéng)。漸開(kāi)線行星輪6與曲柄軸 5連成(chéng)一體,作爲擺線針輪傳動部分的輸入。如果漸開(kāi) 線中心輪7順時(shí)針旋轉,那麼(me),漸開(kāi)線行星齒輪在公轉 的同時(shí)還(hái)逆時(shí)針自轉,并通過(guò)曲柄軸帶動擺線輪做平面(miàn) 運動。此時(shí),擺線輪因受與之齧合的針輪的約束,在其 軸線繞針輪軸線公轉的同時(shí),還(hái)將(jiāng)反方向(xiàng)自轉,即順時(shí) 針轉動。同時(shí),它通過(guò)曲柄軸推動行星架輸出機構順時(shí)針轉動。

掃一掃 / 關注我們
